
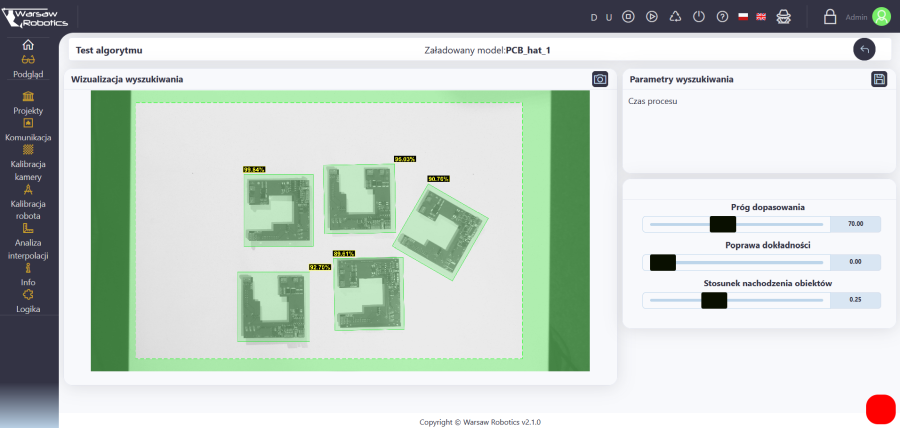
Wyszukiwarka wzorców
Precyzyjna metoda stworzona do wykrywania i wskazywania kształtów powtarzalnych na podstawie stałego wzorca kształtu, uzyskiwanego z pojedynczego zdjęcia. Może być użyta do wskazywanie robotowi części lub innych obiektów technicznych do przenoszenia i pozycjonowania. Zwraca precyzyjne informacje o pozycji i obrocie.

Podstawowa sieć neuronowa
Podstawowa sieć neuronowa. Umożliwia detekcję i klasyfikację obiektów oraz zaznaczenie ich prostokątną ramką.
Wyszukiwarka obiektów prostokątnych
Prosta metoda stworzona do wykrywania i wskazywania obiektów prostokątnych lub o kształcie w rzucie zbliżonym do prostokąta (np.pudełek, batonów, bagietek w opakowaniu foliowym, itd.). Może być użyta do wskazywania robotowi celów do pobrania np. z podajnika taśmowego. Wykorzystuje metodę separacji tła.

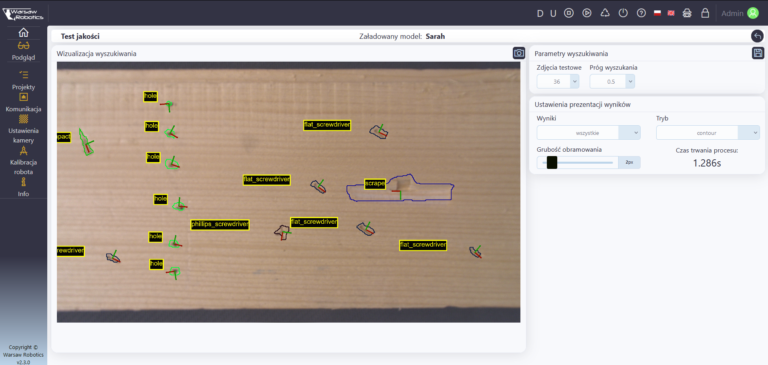
Zaawansowana sieć neuronowa
Zaawansowana sieć neuronowa. Umożliwia detekcję, klasyfikację i segmentację obiektów nieregularnych (np. rozróżnianie typów owoców określanie orientacji) oraz znalezienie precyzyjnego konturu obiektu.

Detektor anomalii
System analizy obrazu Warsaw Robotics umożliwia detekcję anomalii na obiekcie stacjonarnym widocznym w polu roboczym. Metoda znajduje szerokie zastosowanie w kontroli jakości wyrobów. Umożliwia wykrycie wad powierzchniowych lub braków w kompletacji złożeń.
")
Pomiar obiektów regularnych
Metoda wizyjnego pomiaru geometrii krawędzi obiektów regularnych z dokładnością sub-pikselową. System wizyjny Warsaw Robotics oferuje rozbudowany pakiet narzędzi pomiarowych do pomiarów lini prostych, łuków kołowych i okręgów oraz relacji pomiędzy nimi.

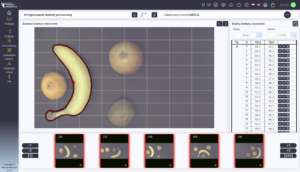
Pomiary obiektów nieregularnych
Metoda wizyjnego pomiaru kształtu stworzona do kontroli jakości obiektów nieregularnych (płody rolne, pieczywo). Zwraca szerokość, długość i informację o odchyłce kształtu wyrobu.

Detekcja anomalii na obiektach
Algorytm umożliwia detekcję anomalii na powierzchni obiektów regularnych losowo rozmieszczonych w polu widzenia. W wyniku działania metody możliwe jest np. odrzucanie obiektów z wadami powierzchniowymi za pomocą robota przemysłowego.

Pomiar na obiektach
Metoda umożliwia przeprowadzanie precyzyjnych pomiarów kształtu na obiektach regularnych rozrzuconych losowo w polu widzenia. W wyniku działania metody możliwe jest np. odrzucanie obiektów przekraczających tolerancje wymiarowe za pomocą robota przemysłowego.

Połączona detekcja anomalii i pomiar obiektów
Połączenie metody detekcji anomalii i pomiarów geometrii wyrobów dla obiektów losowo rozrzuconych w polu widzenia.

Detekcja odchyłek kształtu obiektów nieregularnych
Metoda umożliwia znalezienie odchyłek kształtu obiektów nieregularnych od zdefiniowanego wcześniej wzorca konturu minimalnego i maksymalnego. W wyniku działania algorytmu możliwe jest odrzucanie obiektów (np. owoców, pieczywa,...) nie spełniających wymogów co do kształtu.
Detekcja, klasyfikacja i pomiar wad wyrobów
System umożliwia detekcję, klasyfikację i pomiar cech geometrycznych (pole powierzchni, kierunek ułożenia, rozmiar, itp...) wad widocznych na powierzchni wyrobów. Metoda wykorzystuje zaawansowaną sieć neuronową i tzw. uczenie nadzorowane. Możliwe jest generowanie danych statystycznych.
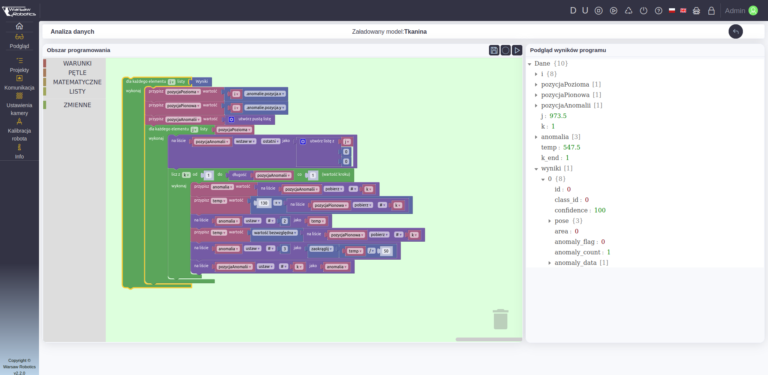
Graficzne programowanie przetwarzania danych
System zawiera rozbudowane możliwości przetwarzania danych powstających w wyniku pracy algorytmów za pomocą języka graficznego. Ułatwia uzyskanie oczekiwanych rezultatów i daje szerokie możliwości aplikacyjne oraz zaawansowane funkcje analityczne. Obok obszaru programowania wyświetlane są na bieżąco wyniki działania programu.
Programowanie komunikacji
Konfigurację struktury komunikatów TCP/IP, MODBUS TCP, DO oraz wbudowanej trójkolorowej diody LED można realizować za pomocą wygodnej metody blokowej. Do dyspozycji użytkownika jest również wyświetlany na bieżąco aktualnie generowany komunikat.
Przygotowywanie zbiorów danych do uczenia sieci neuronowych
System zawiera narzędzia do szybkiego przygotowywania zbiorów danych do treningu sieci neuronowych. Część funkcji jest zautomatyzowana wspomagając pracę użytkownika przy zaznaczaniu obiektów.

Lokalne uczenie sieci neuronowych
System zawiera kompletne środowisko przeznaczone do łatwego uczenia sieci neuronowych przez użytkownika. Trening odbywa się lokalnie, z wykorzystaniem wyłącznie zasobów obliczeniowych kamery.
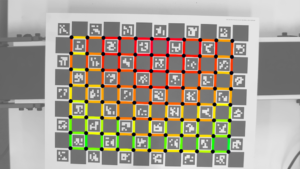
Kalibracja obiektywu
Oprogramowanie umożliwia kalibrację kamery z obiektywem w celu usunięcia dystorsji (odkształceń) obrazu. System umożliwia weryfikację błędów związanych z ustawieniem kamery lub jakością obiektywu.
Kalibracja kamera-robot
Oprogramowanie umożliwia wykonanie kalibracji kamera-robot, pozwalając na precyzyjne związanie pozycji obiektu na obrazie z pozycją osiąganą przez robota.